Solvers of a System of Linear Equations
If we examine the algorithm of the Gaussian elimination,
we can easily find that the zeros
outside the band will neither make any affect to the coefficient matrix nor be
changed by the
algorithm. That is, we need not store them and we need not process them. This
way we can
save the storage space for the coefficient matrix and also we can save computing
time by
neglecting them. This is the idea of the band method. Most of systems of linear
equations
obtained in the finite element method for linear elastic structure are this
type.
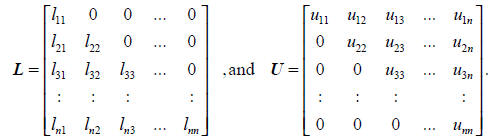
As a variation of the Gaussian elimination algorithm , we can find the Crout
method that
makes a LU decomposition of the coefficient matrix A by a lower
triangular matrix L and
the upper triangular matrix U, or the Cholesski method that makes a
LDU decomposition
of A into a lower triangular matrix L, diagonal matrix D, and
upper triangular matrix U.
Suppose that a given matrix A is decomposed into a LU form :
LUx = b
where
Then the original problem can be decomposed to two matrix
equations :
Ly = b and Ux = y
which can be solved easily by the following algorithm :
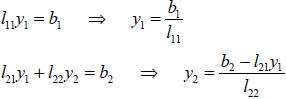

that is
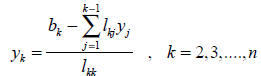
and similarly the second equation can solved as

Thus the main issue is how to make a LU decomposition. Noting that

For the first column vector, we have
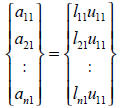
and then if we set up u11 = 1, we can determine the first
column of L. Similarly, the first
row becomes

and then we can determine the first row of U. For the second column and row, we have
and

By setting u22 = 1, we can determine the second column of
L and second row of U.
Continuing this process step by step , yields the LU decomposition. If we examine
this
procedure, it can be found that zeros outside the profile
limit ( that is called the skyline)
shown in the figure, would not make any contribution to the Crout algorithm,
that is, they
need not be stored and can be skipped for their operation .
This method has more advantage than the band method, since
we need not keep some of
zeros within the band of the coefficient matrix. Based on this algorithm, many
skyline ( or
profile ) methods have been developed for finite element analysis.
Both the band and skyline methods require to form the global stiffness matrix of
the whole
structure by assembling all of element stiffness matrices, and then after
forming the
coefficient matrix completely, the Gaussian elimination algorithm is applied.
Therefore, we
cannot reduce storage space too much because of the size of the global stiffness
matrix
which is roughly speaking, mn, where m is the band width and n is the size of
the stiffness
matrix, respectively. The wave front method is the one which utilizes the
special structure
of the finite element approximation, and is the one which may not require
complete
formation of the global stiffness matrix ( that is, the coefficient matrix ). It
eliminates the
terms ( components of the coefficient matrix ) whenever they can be eliminated
before
assembling the rest of finite element stiffness matrices, but at the moment they
are
assembled. In other words, it eliminates the terms “detached” from the rest of
the structure
while assembling. For example, node 1 is only used by element <1>, and then the
terms
related to node 1 can be eliminated at the time of “assembling” of element <1>,
since the
components of the global stiffness matrix related to node 1 are the same with
the completely
assembled global stiffness matrix. Similarly, node 2 is sheared with element 1
and element
2, and then at the stage of assembling the element stiffness matrices up to
element 2, the
terms related to node can be eliminated. Repeating this elimination procedure
while
assembling, the front line of the elimination is moving like waves . It seems
that the naming
of the wave front, or frontal method reflects this nature. Since we do not form
the global
stiffness matrix in complete form before the Gaussian elimination procedure, it
does not
require the space for the global stiffness matrix. It only requires the
sufficiently large space
that can store the assembled stiffness matrix related to the elements on the
wave front.
Using this nature of the method, Iron could solve fairly large scale problems
with relatively
small core memory in computers. At the time Iron introduced his beautiful
engineering idea
to solve a system of linear equations , the success of the finite element method
became quite
sound. It is strongly recommended that Iron’s monumental work should be
thoroughly
studied to understand the role of the finite element method in computer
technology.
Iteration Methods
Another way to eliminate the completely assembled global stiffness matrix to
reduce the
core memory and storage disk space, is application of iteration methods which
requires
only multiplication of the element stiffness matrices and the associated degrees
of freedom.
Noting that the global stiffness matrix is formed by assembling of the element
stiffness
matrices, we have the following relation
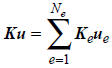
where K is the global stiffness matrix, u is the global
generalized displacement vector, Ke
is the element stiffness matrix, ue is the element generalized displacement
vector, and Ne
is the total number of elements . If a system of linear equations
Ku = f
is considered, it is equivalent to the following :
where P is an arbitrary invertible matrix, and is called
the pre-conditioning matrix. Using
this relation, we can expect the iteration scheme

for an initial guess u(0) . If this algorithm can lead
convergence by iteration, we can find the
solution of the system of linear equations. It is clear that this does not
require the formation
of the global stiffness matrix. Because of this nature, required core memory can
be very
small, and then it was very popular in the early 1960s.
However, since it is iterated, its
convergence was not necessarily guaranteed. Furthermore, estimation of the
required
iteration number was difficult. Because of such uncertainties in iteration
methods, they are
gradually replaced by the direct methods, especially by the wave front method in
the finite
element community in the 1970s.
They were, however, revived at the time of introduction of supercomputers in the
1980s
which are specially design with vector and parallel processing. In order to take
advantage
of these specially designed computer architecture, we once again found that the
iteration
method is the best fit to these new type of computers, and computer scientists
started
showing capability to solve more than a million equations. At this moment, the
most
promising iteration method is regarded as the preconditioned conjugate gradient
method (
PCG method ), convergence of which can theoretically be proven, and required
number of
iterations can also be reduced significantly by introduction of an appropriate
preconditioning
matrix. It is believed that the iteration method would be dominant for solving
large scale problems involving more that a million equations. At this moment (
1996 ),
researchers are challenging to solve 10 to 20 million equations.
Figure X Application of a PCG method to FEA by S. Holister
( Voxelcon Inc. ) using
about 150,000 Solid Elements ( Approximately 450,000 degrees of freedom )
| Prev | Next |