Vectors
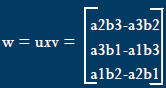
![]() Provides a vector orthogonal to two others
Provides a vector orthogonal to two others

![]() Magnitude provides sine of angle between u
Magnitude provides sine of angle between u
and v
![]() |sin(theta)|=|uxv|/|u||v|
|sin(theta)|=|uxv|/|u||v|
Applications to 3D Graphics
![]() Vertex
Vertex
![]() Matrix
Matrix
![]() Identity
Identity
![]() Rotation
Rotation
![]() Translation
Translation
![]() Scale
Scale
![]() Projection
Projection
![]() Mathematics
Mathematics
![]() Multiplication
Multiplication
![]() Dot Product
Dot Product
![]() Cross Product
Cross Product
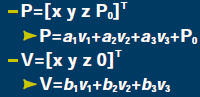
Homogeneous Coordinates
![]() In affine spaces points and vectors can be
In affine spaces points and vectors can be
confused
![]() P=[x y z]T
P=[x y z]T
![]() V=[x y z]T
V=[x y z]T
![]() Instead use
Instead use
![]() Affine transformations preserve lines
Affine transformations preserve lines
Points
 |
Point, same notation as vector. Keep track of units |
 |
Point |  |
Origin |
 |
Specify Standard Space |
 |
Homogenized Point. Intersection with standard plane/space Fails when h=0 |
||
![]()
 , three equations in 3D
, three equations in 3D
![]() Point- Slope Form
Point- Slope Form
![]() m=slope, (x,y)=point 0,
m=slope, (x,y)=point 0, 
![]() L=Q+tw
L=Q+tw
![]() Point-Normal Form
Point-Normal Form
![]() L is the line
L is the line
![]() Q is a point on the line
Q is a point on the line
![]() t is the unknown
t is the unknown
![]() w is a directional vector for the line
w is a directional vector for the line
![]() w must be from one point to another
w must be from one point to another
![]()
 where
where  is
the second point
is
the second point
Plane Equations
![]() p=ax+by+cz+d
p=ax+by+cz+d
![]() Three point form
Three point form
![]() p is the plane
p is the plane
 (cross
(cross
![]() product)
product)
 (dot product)
(dot product)
![]() p=(X-P)·v=0
p=(X-P)·v=0
![]() Point-Normal form
Point-Normal form
![]() X is unknown
X is unknown
![]() P is point on plane
P is point on plane
![]() v is normal to plane
v is normal to plane
Line-Plane Intersections
![]() Substitute for x , y, or z in 3 point form
Substitute for x , y, or z in 3 point form
![]() Works well for slope intercept form
Works well for slope intercept form
![]() Substitute line for X in point normal form
Substitute line for X in point normal form
![]() Works well when line in point normal form
Works well when line in point normal form
![]() Carried out: t=(((P-Q)·v)/(w·v))w
Carried out: t=(((P-Q)·v)/(w·v))w
![]() Intersection point at: Q+(((P-Q)·v)/(w·v))w
Intersection point at: Q+(((P-Q)·v)/(w·v))w
![]() t is time (unknown)
t is time (unknown)
![]() v, w are vectors
v, w are vectors
![]() Q ,P,X are points
Q ,P,X are points
Translation Matrix
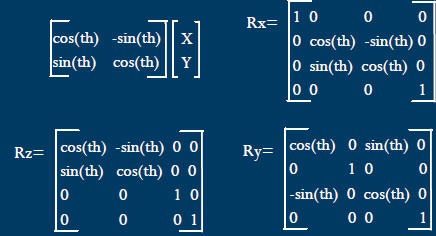
Rotation Matrix
Scaling Matrix
Simple Perspective
Projection Matrix
Mutiple Transformations
![]() Rotate about fixed point
Rotate about fixed point
![]() S=(T)R(-T)p
S=(T)R(-T)p
![]() Instance Transformation
Instance Transformation
![]() Multiple uses of Same object
Multiple uses of Same object
![]() M=TRS
M=TRS
![]() Order of operations
Order of operations
![]() Right to left - fewer component operations
Right to left - fewer component operations
![]() Precalculate matrix ops
Precalculate matrix ops
![]() Not unique effect but resulting matrix is
Not unique effect but resulting matrix is
![]() Rotations relative to
another angle
Rotations relative to
another angle
![]() Translate to origin
Translate to origin
![]() Rotate to align with current orientation
Rotate to align with current orientation
![]() Rotate by specified amount
Rotate by specified amount
![]() Rotate to unalign with orientation
Rotate to unalign with orientation

![]() Rotation about an
arbitrary axis
Rotation about an
arbitrary axis
![]() Rotate to the axis first
Rotate to the axis first
![]() Apply a rotation to the rotation
Apply a rotation to the rotation
![]() Brings it into the correct frame of reference or
Brings it into the correct frame of reference or
orientation first
OpenGL
![]() Provides 2 Frames
Provides 2 Frames
![]() Camera frame, fixed
Camera frame, fixed
![]() World frame
World frame
![]() Current Transformation Matrix
Current Transformation Matrix
![]() Applied to everything
Applied to everything
![]() Changing CTM changes state of environment
Changing CTM changes state of environment
![]() 4x4 Matrix
4x4 Matrix
OpenGL Matrix Operations
![]() Replacement Matrices
Replacement Matrices
![]() glLoadIdentity()
glLoadIdentity()
![]() glLoadMatrixf(pointer to matrix);
glLoadMatrixf(pointer to matrix);
![]() Matrix Transformations
Matrix Transformations
![]() glRotatef(angle, vx, vy, vz);
glRotatef(angle, vx, vy, vz);
![]() glTranslatef(dx, dy, dz);
glTranslatef(dx, dy, dz);
![]() glScalef(sx, sy, sz);
glScalef(sx, sy, sz);
![]() glMultMatrixf(myarray);
glMultMatrixf(myarray);
![]() Rotation about a
fixed point
Rotation about a
fixed point
![]() glMatrixMode(GL_MODELVIEW);
glMatrixMode(GL_MODELVIEW);
![]() glLoadIdentity();
glLoadIdentity();
![]() glTanslatef(4.0, 5.0, 6.0);
glTanslatef(4.0, 5.0, 6.0);
![]() glRotatef(45.0, 1.0, 2.0, 3.0);
glRotatef(45.0, 1.0, 2.0, 3.0);
![]() glTranslatef(-4.0, -5.0, -6.0);
glTranslatef(-4.0, -5.0, -6.0);
![]() Matrices are generated left to right
Matrices are generated left to right
![]() Matrix farthest to the right is applied first
Matrix farthest to the right is applied first
Matrix Stacks
![]() Saving of states
Saving of states
![]() Transform only part of a scene
Transform only part of a scene
![]() Scale a single object
Scale a single object
![]() Rotate a heirarchical object
Rotate a heirarchical object
![]() Apply transformation then restore original
Apply transformation then restore original
state
![]() glPushMatrix();
glPushMatrix();
![]() glScalef(3.0, 4.0, 5.0);
glScalef(3.0, 4.0, 5.0);
![]() /* Draw Scaled Object */
/* Draw Scaled Object */
![]() glPopMatrix();
glPopMatrix();
| Prev | Next |