Matrix Operations
Section 2.9 { Dimension, Rank, and Coordinates
Dimension
Exercises 27 and 28 in section 2.9 of the text show the following important
fact.
every basis for a subspace H has the same number of vectors.
Definition. The dimension of a nonzero subspace H (written as
"dim H") is
the number of vectors in any basis for H. The dimension of the zero subspace
 is defined to be zero, and that subspace actually has no basis. (Why?)
is defined to be zero, and that subspace actually has no basis. (Why?)
The space Rn has dimension n. Every basis for Rn contains n vectors. A plane
through the origin in R3 is two-dimensional, and a line through the origin is
one-
dimensional. (A plane which doesn't go through the origin is not a subspace,
and so it doesn't have a basis or a dimension.)
Definition. The rank of a matrix A (written as "rank A") is the dimension
of the column space of A, i.e. dim Col A.
Notes. The pivot columns of A form a basis for Col A, so the rank of A is the
number of pivot columns. Each column of A without a pivot represents a free
variable in
 , and will be associated with one vector in a basis for Nul
A.
, and will be associated with one vector in a basis for Nul
A.
So dim Nul A is the number of columns without pivots.
Theorem 14: (Rank Theorem). If a matrix has n columns, then
Theorem 15:(Basis Theorem). Let H be a p-dimensional subspace of Rn.
Then any linearly independent set of exactly p vectors in H spans H (and is
therefore a basis for H). Also, any set of p vectors which spans H is linearly
independent (and is therefore a basis for H). (Proved in section 4.5 of the
text.)
Also, look over the continued pieces of the Invertible Matrix Theorem (on page
179), and ask about any which are not clear. This theorem, which began
in section 2.3, now has 18 statements about invertible matrices, which are all
equivalent ! And it's very important to note, these 18 statements are only equiv-
alent for square matrices . If A is not square, then e.g. parts (a) and (j) are
not
equivalent (and many other parts break as well).
Coordinates
Reminder Given a set of vectors
 ,
can we write another vector
,
can we write another vector

as a linear combination of the given set?
To answer this question, row reduce the augmented matrix
 .
.
If the system is consistent , the answer is "yes," otherwise "no." A
solution

to
 gives coefficients
x 1, . . . , xp satisfying
gives coefficients
x 1, . . . , xp satisfying

If the matrix A is invertible, there will be a unique way to write
as a
linear
combination of
 . In fact, the coefficients will be
. In fact, the coefficients will be

Say we have a set
 which is a basis for some subspace H.
Given
which is a basis for some subspace H.
Given
any vector
 , we can write
, we can write
 as a unique linear combination of the vectors
as a unique linear combination of the vectors
in
 ,
let's say
,
let's say . This vector of coefficients
. This vector of coefficients
 is called
the coordinate vector of
is called
the coordinate vector of
 relative to
, or the
-coordinate vector
relative to
, or the
-coordinate vector
of
,
and is written as
 .
Note that the order of the vectors in
.
Note that the order of the vectors in
matters, changing their order would change .
.
Example 1 (from textbook)
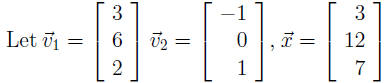 ,
and
,
and
 Let H = Span
Let H = Span .
.
Here,
is actually a basis for H because the vectors in
are linearly indepen-
dent, and by definition they span H.
Determine whether
is in H, and find its B-coordinates if it is.
If
is in H, then the following vector equation is consistent .
=
The scalars c1 and c2, if they exist, are the
-coordinates of
. Row reduction
gives
and so

A More General Example
Consider the "vector space" V of all 3 × 3 matrices. See section 4.1 for details
about vector
spaces in general, we won't worry about all of the details for now. But
basically, a vector space
is a collection of "objects" satisfying some basic properties . We call these
objects "vectors"
even though they may not be vectors in Rn as we are accustomed to. They may be
matrices,
polynomials , some other types of functions, etc.
Subspace
Now think about H, the subset of V consisting of all symmetric matrices
satisfying AT = A.
Note that in a symmetric matrix,
 In fact, H is a subspace of V . The
three properties
In fact, H is a subspace of V . The
three properties
hold.
(i) The zero "vector" from V is in H. But now we are thinking about the vector
space V , so
the zero element in V is really the 3 × 3 matrix containing all zeros.
(ii) The sum of two symmetric matrices is symmetric. So if we have two "vectors"
in H, their
sum is in H.
(iii) A symmetric matrix multiplied by a constant is still symmetric. So any
constant times a
"vector" in H is still in H.
Basis
A basis for H would be a set of linearly independent "vectors" from H which span
H. A
"vector" in H is a symmetric 3 × 3 matrix. Consider the following six
"vectors" from H.
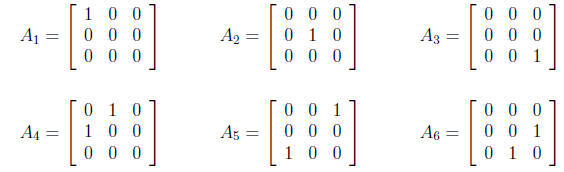
First, I'll verify that these six matrices are linearly independent, by thinking
about the equation
 (where remember that this vector
(where remember that this vector
 is really the zero
vector in V , i.e. the
is really the zero
vector in V , i.e. the
3 × 3 matrix of zeros).
The only way that matrix will be the zero matrix is if
each of c1, . . . , c6
are all zero. So the
only linear combination of {A1, . . . ,A6} which gives zero is the trivial
linear combination, so
this set of "vectors" {A1, . . . ,A6} is linearly independent.
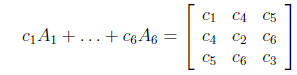
Next, any symmetric 3×3 matrix (i.e. a matrix satisfying
 ) is of the
form given below
) is of the
form given below
(first I write a completely general 3 × 3 matrix, and then rewrite it imposing
the symmetry
constraint).

The symmetric matrix above can be written as the linear combination

So in fact the set {A1, . . . ,A6} spans H. Since the set is also linearly
independent, it is a basis
for H.
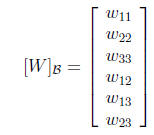
Coordinates
Given the basis B = {A1,A2,A3,A4,A5,A6}, the coordinates of the general
symmetric matrix
W given above are
Part of the real power of coordinates is that they let us take problems in more
abstract spaces,
and turn them back into problems using "regular" vectors in Rn and matrices that
we've been
studying.
For example, given the three symmetric matrices in H

can we write the matrix
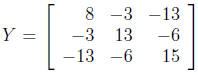 as a linear combination of B1,B2, and B3?
as a linear combination of B1,B2, and B3?
If so, how?
Looking back at how we wrote the B-coordinates of a general symmetric matrix W,
we can see
that
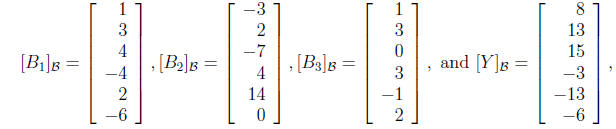
Then, the question "can we write Y as a linear combination of B1,B2, and B3" is
the same
as asking "can we write [Y ]B as a linear combination of [B1]B,
[B2]B, and
[B3]B?" We would
answer that question by row-reducing the augmented matrix.
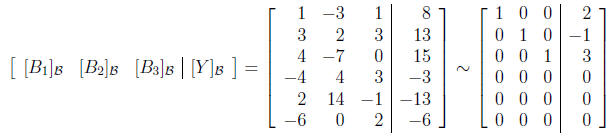
This system is consistent and has a unique solution x 1 = 2, x2 =
-1, and x3 = 3.
So yes,
[Y ]B can be written as the linear combination [Y ]B = 2[B1]B -[B2]B +3[B3]B,
and so Y can be
written as the linear combination
Y = 2B1 - B2 + 3B3.
Similarly, any of the things we've done so far with vectors can be done within
this space of
3 × 3 matrices.
E.g. asking if B1, B2, and B3 are linearly independent can be done by checking
whether the
three vectors [B1]B, [B2]B, and [B3]B are linearly independent. That is, put
those vectors into
the columns of a matrix and row reduce, and check whether every column has a
pivot. If so,
then B1,B2, and B3 are linearly independent. If any column has no pivot, they
are linearly
dependent.
| Prev | Next |