LINEAR ALGEBRA NOTES
Contents
1. Systems of linear equations
2. Matrices of a system
3. Gauss elimination
4. Matrices
5. Matrix operations
6. Inverse matrix
7. Determinants
8. Vector spaces
9. Linear independence
10. Bases
11. row, column and null spaces
12. Coordinates
13. Linear transformations
14. Eigenvalues and eigenvectors
15. Diagonalization
16. Bilinear functional
17. Inner product
18. Orthogonal bases and Gram-Schmidt algorithm
19. Least square solution and linear regression
1. Systems of linear equations
linear equation: 
variables: 
coefficients: 
main coefficient: 
constant term : b
linear system: m equations, n unknowns
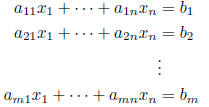
solution: n-tuple
 satisfying all equations
satisfying all equations
consistent system: has a solution
inconsistent system: has no solution
solution set: set of all solutions
equivalent systems: have the same solution set
elementary operations on equations : make equivalent systems
(i) multiply an equation by a nonzero constant
(ii) interchange two equations
(iii) add a constant multiple of an equation to another
elimination: use elementary operations to eliminate unknowns
fact: a linear system has no solution, exactly one solution or infinitely
many solutions
parameters: used to describe infinitely many solutions
homogeneous system: constant terms are 0 (consistent)
trivial solution: all variables are 0
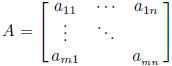
2. Matrices of a system
coefficient matrix :
constant vector:  unknown vector:
unknown vector: 
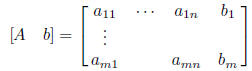
augmented matrix:
3. Gauss elimination
elementary row operations: (ero) correspond to elementary operations on
equations
(i) multiply a row by a nonzero constant 
(ii) interchange two rows 
(iii) add a multiple of a row to another row 
row equivalent matrices: one can be gotten from the other by elementary
row operations
fact: linear systems with row equivalent augmented matrices have the same
solution set
echelon matrix: the number of leading zeros is strictly increasing in
each row until you get all 0 rows
Gauss elimination: use elementary row operations to get echelon form
leading entry: first nonzero entry in a row
leading (pivot) column: column containing a leading entry
leading variable: a variable corresponding to a leading column
free variable: not leading
back substitution: get solution set from echelon form
(i) set free variables equal to parameters
(ii) solve last nonzero equation for leading variable
(iii) substitute into preceding equation
(iv) continue
reduced echelon matrix:
(i) echelon matrix
(ii) every leading entry is 1
(iii) every leading entry is the only nonzero entry in it's column
Gauss-Jordan elimination: use elementary row operations to get reduced
echelon form
fact: every matrix is row equivalent to a unique reduced echelon matrix
fact: system with square coefficient matrix A has unique solution i A is
row equivalent to I
fact: system with more unknowns than equations is inconsistent or has
infinitely many solutions
4. Matrices
matrix: rectangular array of numbers
notation: 
scalar: real number
size of a matrix: size (A) = m × n if m rows and n columns
square matrix: m = n
diagonal matrix: 
zero matrix : O all entries  are 0
are 0
identity matrix: 
(column) vector: has size n× 1
row vector: has size 1 × n
 slightly abusive
slightly abusive
 set of n-tuples,
set of n-tuples,

 : set of m × n matrices,
: set of m × n matrices, is identified with
is identified with 
basic unit vectors:  (1 in j-th
position), column vectors of
(1 in j-th
position), column vectors of 
column vectors: 
5. Matrix operations
matrix addition:  if A, B have
the same size
if A, B have
the same size
matrix subtraction: 
scalar multiplication: 
negative matrix : -A = (-1)A
properties:
A + B = B + A commutative
A + (B + C) = (A + B) + C associative
c(A + B) = cA + cB distributive
(c + d)A = cA + dA distributive
(cd)A = c(dA) associative
matrix multiplication: C = AB, size(C) = m × n, size(A) = m × p, size(B)
= p× n

properties:
A(BC) = (AB)C associative
A(B + C) = AB + AC distributive
(A + B)C = AC + BC distributive
c(AB) = (cA)B = A(cB)
warning:
AB ≠ BA in general

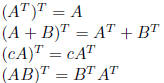
transpose:  where
where

properties:
fact: product of diagonal matrices is diagonal
matrix form of linear system: 
linear combination: of objects  is a finite
sum of scalar multiples of the objects
is a finite
sum of scalar multiples of the objects 
span: of objects is the set of linear
combinations of the objects

fact: solution set of homogeneous system is the span of particular
solutions (one for each parameter)
6. Inverse matrix
A invertible:  such that AB = BA = I
such that AB = BA = I
B is the inverse of A (A is also the inverse of B)
properties:
invertible square
square
inverse is unique if exists, notation 
if A is invertible then Ax = b has unique solution

fact:  is invertible iff
is invertible iff

elementary matrix:  single elementary
row operation
single elementary
row operation
properties:
 implies
implies  equivalently
equivalently 
 inverse ero
inverse ero
fact: A invertible i A row equivalent to I
fact: A, B row equivalent iff  ,
for
,
for  elementary
elementary
algorithm for A-1:
more generally 
7. Determinants
notation: 
notation:  after deletion of i-th row
and j-th column
after deletion of i-th row
and j-th column
ij-th cofactor of A: 
chess board rule:
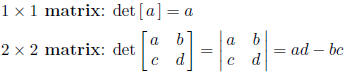
inductive definition: 
cofactor expansion along first row
cofactor expansion:
along i-th row 
along j-th column 
elementary row operations: 
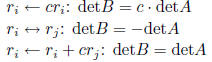
properties:
A triangular implies 
detI = 1
 implies detA = 0
implies detA = 0
A invertible iff detA ≠ 0
Cramer's rule: detA ≠ 0 implies solution of Ax = b is
 where
where  comes from A after replacing i-th column by b
comes from A after replacing i-th column by b
adjoint of A:  transpose of matrix of
cofactors
transpose of matrix of
cofactors
adjoint formula for inverse: 
| Prev | Next |