Matrices, Vectors and Systems of Linear Equations
§1.1 Matrices and Vectors
I Matrices
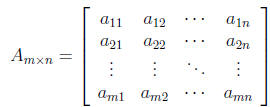
Definition 1. A matrix is a rectangular array of scalars. If the matrix
has m rows and
n columns, we say that the size of the matrix is m by n, written m × n.
The matrix is
square if m = n. The scalar in the ith row and jth column is called the
(i, j)-entry of
the matrix.
Remark 1.
(i) Two matrices A and B are equal if they have the same size and
 for all i
for all i
and j.
(ii) If A and B are m × n matrices and c is a scalar, then
• A± B is the m × n matrix with the (i, j)-entry=
 .
.
• cA is the m × n matrix with the (i, j)-entry= caij .
• The transpose AT of A is the n×m matrix with the (i, j)-entry= the (j, i)-entry
of A, that is,
 .
.
(iii) Special matrices:
• Zero matrix 0 is the matrix with each entry= 0.
• The n × n identity matrix is the matrix with the diagonal entry= 1 and the
rest of entries are zero.
Theorem 1. Properties of Matrix Addition and Scalar Multiplication
Let A, B and C be m × n matrices, and let s and t be any scalars. Then
(a) A + B = B + A. (commutative law of matrix addition)
(b) (A + B) + C = A + (B + C). (associative law of matrix addition )
(c) A + 0 = A.
(d) A + (-A) = 0.
(e) (st)A = s(tA).
(f) s(A + B) = sA + sB.
(g) (s + t)A) = sA + tA.
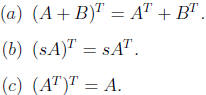
Theorem 2. Properties of the Transpose
Let A and B be m × n matrices, and let s be any scalars. Then
II Vectors
A matrix that has exactly one row is called a row vector and a matrix that has
exactly
one column is called a column vector. The entries of a vector are called
components.
Remark 2. Geometrical interpretation of vectors are explain in the textbook,
page 8-11.
§1.2 Linear Combinations, Matrix-Vector Products and Special
Matrices
III Linear Combinations
Definition 2. A linear combination of vectors
 is a vector
of the form
is a vector
of the form

where  are scalars. These scalars are called the
coefficients of
the linear
are scalars. These scalars are called the
coefficients of
the linear
combination .
Remark 3.
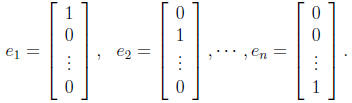
(i) In general, the standard vector of Rn is defined by
(ii) If  and
and
 are any nonparallel vector in R2, then
every vector in R2 is a linear
are any nonparallel vector in R2, then
every vector in R2 is a linear
combination of and
.
IV Matrix- Vector Products
Definition 3. Let A be an m × n matrix and  be an n × 1 vector. We define the
be an n × 1 vector. We define the
matrix-vector-product of A and , denoted by A , to be the linear
combination of
the column of A whose coefficients are the corresponding components of
. That
is,

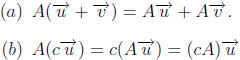
Theorem 3. Properties of Matrix- Vector Products
Let A, B and C be m × n matrices, and let
![]() and
be vectors in Rn. Then
and
be vectors in Rn. Then
 for every scalar c.
for every scalar c.
 where
where  is the jth standard vector
in Rn.
is the jth standard vector
in Rn.
(e) If B is an m × n matrix such that  for all
for all
 in Rn, then B = A.
in Rn, then B = A.
(f)  is m × 1 zero vector .
is m × 1 zero vector .
(g) If 0 is the m × n zero matrix, then 0![]() is the m × 1 zero vector.
is the m × 1 zero vector.
Remark 4. If follows from (a) and (b) in the above theorem, that for any m × n
matrix
A, any scalars  and any vector
and any vector
 in Rn,
in Rn,

V Rotation Matrices in R2
Definition 4. In R2, we call
the θ-rotation matrix, or more simply , a rotation matrix.
Remark 5.
1. For any vector ![]() in R2, the vector
in R2, the vector  is the vector obtained by rotating
is the vector obtained by rotating
![]() by
by
an angle θ, where the rotation is counterclockwise if θ > 0 and clockwise if
θ <
0.
2. The 00-rotation matrix  .
.
| Prev | Next |