Matrix
Matrices
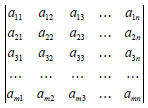
An m×n matrix is a rectangular array of complex or real
numbers arranged in m rows and n columns:
Types, Operations, etc.
▪ Types: square, symmetric, diagonal, Hermithean, …
▪ Basic operations: A+B, A-B, AB (AB≠BA).
▪ Square matrices
▪ Determinant: det(A)
▪ Inverse matrix A-1: AA-1 = I (I is a unit matrix)
▪ …
Applications
 |
 Linear systems of equations Linear systems of equations |
Eigenvalue problem
 |
 |
Linear systems of equations
▪
m>n over determined system (data processing)
▪
m=n square case (what we will do)
▪
m<n under determined system
Linear systems in matrix notation
or Ax = b
Two cases for right-hand coefficients
 right-hand coefficients b i ≠ 0
right-hand coefficients b i ≠ 0
Unique solution if the determinant det(A) ≠ 0
 right-hand coefficients bi = 0
right-hand coefficients bi = 0
Unique solution if the determinant det(A) = 0
Analytic solutions for n=2
a11x1 + a12x2=b1
a21x1 + a22x2=b2
expressing the first unknown x 1 from the first equation
x1 = (b1 - a12x2)/a11
and substituting to the second equation we have a
single equation with one unknown x2.
Gaussian elimination
 Since there is no such an operator as elimination
Since there is no such an operator as elimination
neither in C++ nor Fortran we should translate this
procedure to an appropriate numerical method for
solving systems of linear equations.
 Numerical method = Gaussian elimination
Numerical method = Gaussian elimination
Gaussian elimination for n =3
Let subtract the first equation multiplied by the coefficient a21/a11 from the
second one, and multiplied by the coefficient a31/a11 from the third equation.

Step 2:
Repeating the same procedure to the last of two equations
gives
where
Step 3:
Doing back substitution we will find x2 and then x1.
This direct method to find solutions for a system of
linear equations by the successive elimination is
known as Gaussian elimination.
Problems!
 zero diagonal elements
zero diagonal elements
 round-off errors
round-off errors
 ill-conditioned systems
ill-conditioned systems
 computational time
computational time
| Prev | Next |