Semidefinite Programming
Two remarks on previous lecture
• Fact 9 shows that pd (or psd) can be verified by checking that every
principal minor
is positive (or nonnegative). For pd we only need to examine leading principal
minors.
However, this does not work for verifying psd as

shows. This matrix has leading minors equal to zero but a negative trailing minor.
• Fact 10 has introduced the Schur complement. If


This lends itself to showing that the Cholesky factorization of a pd matrix exists.
Fact 11 (Representing quadratics) Given
 the quadratic form
the quadratic form

while a quadratic function of x, is a linear function of X := xxT .
Fact 12 If U and V are psd, then U • V≥0 (used in
showing weak duality for SDPs). In
fact, we have the following theorem.
Theorem 1 If
 ,
then K is self-dual,
,
then K is self-dual,


Proof: Part 1: showing
 want to show that if
want to show that if

Demonstration 1: By facts 3, 4, and 6 we can assume that one of U, V is
diagonal. But then
 (need
only look at the diagonal entries).
(need
only look at the diagonal entries).
Demonstration 2: By Fact 1, and the existence of matrix square roots ,

since
 is psd (Fact 7) and so its trace is nonnegative
is psd (Fact 7) and so its trace is nonnegative
Part 2: showing
 by
contraposition, i.e., if
by
contraposition, i.e., if

If
 , then by definition there exists a z such that
, then by definition there exists a z such that
 (by Fact 11).
(by Fact 11).
But
 by Corollary 1, so
by Corollary 1, so

By the same argument, if
 This shows a similarity
This shows a similarity
between nonnegative vectors and the cone of psd matrices.
Fact 13 If
 is compact.
is compact.
Proof: The set is clearly closed, so need to show it is also bounded.
Suppose

(since
 Then
Then

for any
 So any V in the set has
So any V in the set has
Fact 14 If

Proof: First note that if UV = 0 then clearly U • V = trace (UV ) = 0. To
show the
converse suppose
 with U • V = 0. Then
with U • V = 0. Then

so
 Define
Define
 to obtain the condition ATA = 0.
to obtain the condition ATA = 0.
This implies A = 0 since the diagonal entries of ATA are the squares of the
2-norms of the
columns of A. But
 easily gives UV = 0.
easily gives UV = 0.
Fact 15 If
 then U, V commute iff UV is symmetric, and iff they can be
then U, V commute iff UV is symmetric, and iff they can be
simultaneously diagonalized , i.e., iff we can find Q,
 ,M (Q orthogonal,
,M (Q orthogonal,
 ,M
diagonal) with
,M
diagonal) with

Proof: Omitted, since part of HW1.
Applications
Matrix and NLP optimization problems
We have already shown how to minimize the maximum eigenvalue of a symmetric


What if M(y) is not symmetric and not necessarily square ? For example, say we
want
 as small as possible. Recall:
as small as possible. Recall:

Lemma 1

Proof: Observe that the above matrix retains linearity w.r.t. η, y. Examine two cases:
If P = 0, then both conditions reduce to

If P ≠ 0,

With η > 0, the last condition is equivalent to
 which holds
which holds
iff which
is what we needed to show.
which
is what we needed to show.
Note that we have also shown that
So,
 is
equivalent to
is
equivalent to
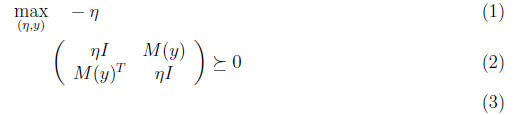
which is the desired SDP in dual form.
Linear programming and nonlinear programming
Consider first an LP in dual form

and try to rewrite it as an SDP. The constraint

where C = Diag(c) and Aii = Diag(ai) and ai is the ith column of AT . This
gives the equivalent
SDP in dual form.
Now consider a correspondence between primal LP and SDP. The primal SDP is given by

whereas the primal LP is given by

In general, our SDPs may have block diagonal form. Suppose
 and
and
define

If C and all Ai’s are in S then automatically
 for any
for any  The primal
The primal
problem involves 
but we can restrict X to S without loss of generality (see
HW1). Applying this to the primalform
SDP above we can assume that X is diagonal, so that it reduces to the
primal -form
LP.
| Prev | Next |