Polynomials
Roots
Lemma 3. Let a be a root of f ∈F[x]. Then (x − a) divides f(x).
Proof.
Write
f = q(x − a) + r
where deg(r) < 1. But then r must be 0, done.
Lemma 4. Any non-zero polynomial f ∈F[x] has at
most deg(f) many roots.
Proof.
Use the last lemma and induction on the degree.
Decomposition
So if deg(f) = n and f has n roots we decompose f completely into linear terms :

Of course, there may be fewer roots, even over a rich field such as R: f =
x^2 + 2 has no
roots.
This problem can be fixed by enlarging R to the field of complex numbers C (the
so-called
algebraic completion of R).
More Roots
Note that over arbitrary rings more roots may well exist.
For example over R = Z15 the equation x^2 − 4 = 0 has four roots: {2, 7, 8, 13}.
But of course

Exercise 6. Using the Chinese Remainder Theorem explain why there are
four roots in
the example above. Can you generalize?
Point-Value Represenation
The fact that a non- zero polynomial of degree n can have at most n roots can
be used to
show that the interpolating polynomial
is unique: suppose g is another interpolating polynomial so that g(ai) = bi.
Then f − g has n + 1 roots and so is identically zero.
Hence we have an alternative representation for polynomials: we can give a
list of
point-value pairs rather than a list of coefficients.
To the naked eye this proposal may seem absurd: why bother with a
representation that
is clearly more complicated? As we well see, there are occasions when
point-value is
computationally superior to coefficient list.
Suppose we have two univariate polynomials f and g of degree bound n.
Using the brute force algorithm (i.e., literally implementing the definition
of multiplication
in
 we
can compute the product
we
can compute the product
 ring operations .
ring operations .
Now suppose we are dealing with real polynomials. There is a bizarre way to
speed up
multiplication:
• Convert f and g into point -value representation where the
support points are carefully chosen.
• Multiply the values pointwise to get h.
• Convert h back to coefficient representation.
FFT
It may seem absurd to spend all the effort to convert between coefficient
representation
and point-value representation. Surprisingly, it turns out that the conversions
can be
handled in
 (n log n) steps using a technique called Fast Fourier Transform.
(n log n) steps using a technique called Fast Fourier Transform.
But the pointwise multiplication is linear in n, so the whole algorithm is
just
(n log n).
Theorem 2. Two real polynomials of degree bound n can be multiplied in
(n log n)
steps.
Take a look at CLR for details.
Vandermonde Matrices
Here is another look at conversions between coefficient and point-value
representation,
i.e., between evaluation and interpolating.
Definition 7. Define the n by n Vandermonde matrix by
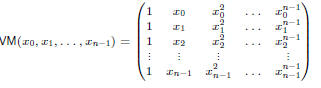
Lemma 5.

Evaluation versus Interpolation
It follows that the Vandermonde matrix is invertible iff all the xi
are distinct. Now
consider a polynomial

To evaluate f at points
 we can use matrix-by-vector multiplication:
we can use matrix-by-vector multiplication:

But given the values
 we can obtain the coefficient vector by
we can obtain the coefficient vector by

Implicit Representation
Recall our alternative way of defining polynomials: formal expressions
involving ring
elements and the variables using operations plus and times .
We have used this implicit representation in several places already, without
any protest
from the audience.
• The expressions
 encountered
encountered
in the root decomposition.
• The description of the determinant of a Vandermonde
matrix

• Using interpolation and evaluation to retrieve the secret in
Shamir’s method.
So?
More precisely, we could consider polynomials to be arbitrary expressions
built from
• the variables x1, . . . , xn,
• elements in the ground ring,
• addition , subtraction and multiplication.
Obviously we can recover the explicit polynomial (i.e. the coefficient list)
from these
explicit representations.
Example 1. Polynomial
 expands to
expands to

We just have to expand (multiply out) to get the “classical form”.
What exactly is meant by “expanding” a polynomial?
Expanding Polynomials
We want to bring a multivariate polynomial
 into normal form. First
into normal form. First
we apply rewrite rules to push multiplication to the bottom of the tree until we
have a
sum of products:
Then we collect terms with the same monomial and adjust the coefficent.

Some terms may cancel here (we don’t keep monomials with coefficent 0).
Computationally it is probably best to first sort the terms (rather than
trying to do pattern
matching at a distance).
The problem is that it may take exponential time to perform the expansion:
there may be
exponentially many terms in the actual polynomial.
Polynomial Identities
A task one encounters frequently in symbolic computation is to check whether
two
polynomials are equivalent, i.e., whether an equation between polynomials

holds in the sense that for all

Definition 8. Two polynomials
 are equivalent if for all
are equivalent if for all

 In particular f is identically zero if
In particular f is identically zero if
 and 0 are equivalent.
and 0 are equivalent.
In other words, two polynomials
 are equivalent iff b
are equivalent iff b

Notation:

Zero Testing
Note that the polynomial identity
 can be rewritten as
can be rewritten as
Problem:
How can we check whether a multivariate polynomial
 is identically zero?
is identically zero?
Note: The polynomial may not be given in normal form, but as in the example
in a much
shorter, parenthesized form. We want a method that is reasonably fast without
having to
expand out the polynomial first.
Using Roots
Assume that the ground ring is a field F.
Suppose f has degree d. As we have seen, in the univariate case there are at
most d
roots and d roots determine the polynomial (except for a multiplicative
constant).
So we could simply check if the polynomial vanishes at, say, a = 0, 1, 2, . .
. , d: f will
vanish on all d + 1 points iff it is identically zero.
Requires only d + 1 evaluations of the polynomial (in any form).
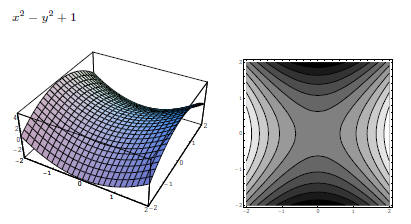
Unfortunately, the roots for multivariate polynomials are a bit more complicated.
A Quadratic Surface
The Key Lemma
Lemma 6. Let
 be of degree d and
be of degree d and
 a set of cardinality s.
a set of cardinality s.
Then f is not identically zero then f has at most

Proof.
The proof is by induction on n.
The set S here could be anything. For example, over Q we might choose
S = {0, 1, 2, . . . , s − 1}.
Schwartz’s Method
The main application of the lemma is to give a probabilistic algorithm to
check whether a
polynomial is zero.
Suppose f is not identically zero and has degree d.
Choose a point
 uniformly at random and evaluate
uniformly at random and evaluate
 Then
Then

So by selecting S of cardinality 2d the error probability is 1/2.
Note that the number of variables plays no role in the error bound.
A Real Algorithm
To lower the error bound, we repeat the basic step k times.
// is f identically zero ?
do k times
pick a uniformly at random in Sˆn
if( f(a) != 0 )
return false;
od
return true;
Note that the answer false is always correct.
Answer true is correct with error bound " provided that

Certainty
With more work we can make sure the f really vanishes.
Corollary 1. Let
 be of degree d and
be of degree d and
 a set of cardinality
a set of cardinality
s > d. If f vanishes on
 then f is identically zero.
then f is identically zero.
But note that for finite fields we may not be able to select a set of
cardinality higher than
d.
Recall the example over Z2: in this case we can essentially only choose S =
Z2, so only
degree 1 polynomials can be tackled by the lemma.
That’s fine for univariate polynomials (since any monomial xi simplifies to x)
but useless
for multivariate polynomials.
Application
Recall that a perfect matching in a bipartite graph is a subset M of the
edges such that
the edges do not overlap and every vertex is incident upon one edge in M.
There is a polynomial time algorithm to check whether a perfect matching
exists, but
using Schwartz’s Lemma one obtains a faster and less complicated algorithm.
Suppose the vertices are partitioned into ui and vi, i = 1, . . . , n .
Define a n × n matrix A by
Note that the determinant of A is a polynomial whose non-zero terms look like

Testing Perfect Matchings
Proposition 4. The graph has a perfect matching iff
the determinant of A is not
identically zero.
Proof.
If the graph has no perfect matching then all the terms in the determinant are 0
(they all
involve at least one non-edge).
But if the graph has a perfect matching it must have the
form 
 where π is a permutation.
where π is a permutation.
But then the determinant cannot be 0 since the
corresponding monomial cannot be
cancelled out.
| Prev | Next |